

目录
快速导航-
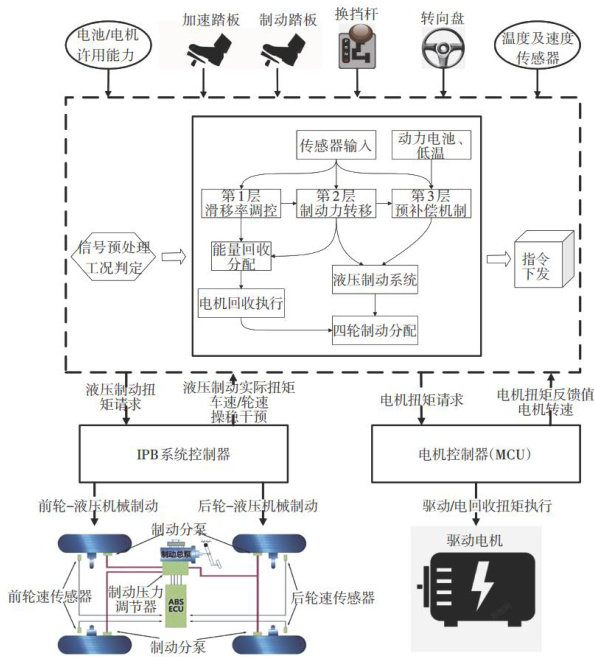
2025中国汽车工程学会年会优秀论文(选登) | 基于液压制动补偿的后轮驱动车辆能量回收控制研究
2025中国汽车工程学会年会优秀论文(选登) | 基于液压制动补偿的后轮驱动车辆能量回收控制研究
-
2025中国汽车工程学会年会优秀论文(选登) | 考虑热耦合的插电式混合动力客车能量管理策略研究
2025中国汽车工程学会年会优秀论文(选登) | 考虑热耦合的插电式混合动力客车能量管理策略研究
-
2025中国汽车工程学会年会优秀论文(选登) | 轮毂电机驱动电动汽车悬架设计优化
2025中国汽车工程学会年会优秀论文(选登) | 轮毂电机驱动电动汽车悬架设计优化
-
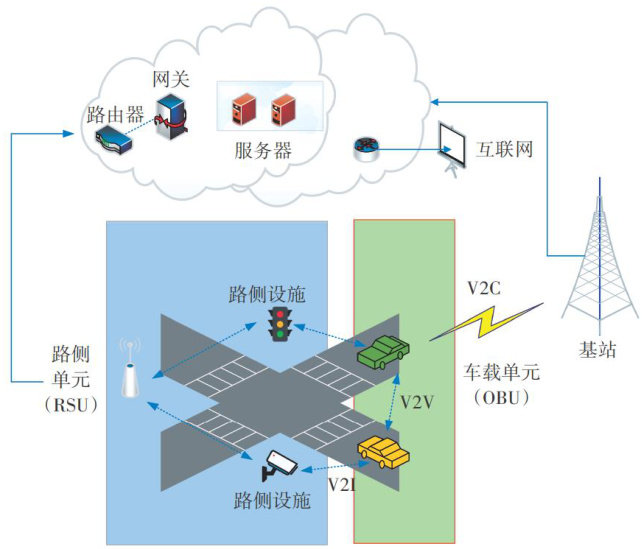
2025中国汽车工程学会年会优秀论文(选登) | 车路协同系统应用场景信息交互研究综述
2025中国汽车工程学会年会优秀论文(选登) | 车路协同系统应用场景信息交互研究综述
-
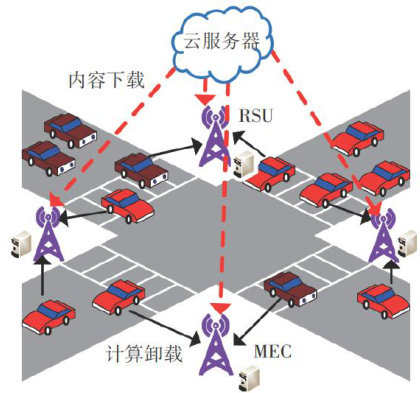
2025中国汽车工程学会年会优秀论文(选登) | 基于云边协同的车联网资源分配与任务卸载
2025中国汽车工程学会年会优秀论文(选登) | 基于云边协同的车联网资源分配与任务卸载
-
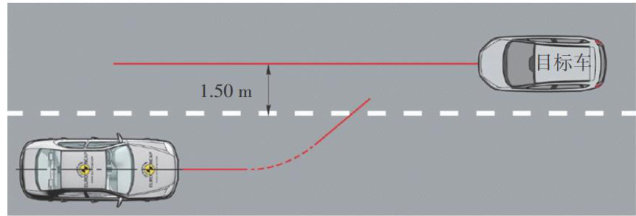
2025中国汽车工程学会年会优秀论文(选登) | 智能汽车横向避障路径规划与控制研究
2025中国汽车工程学会年会优秀论文(选登) | 智能汽车横向避障路径规划与控制研究















 登录
登录